Tech Blog – Power over coax – Jak snížit váhu kabeláže pro ADAS senzory?
Automobilový průmysl v posledních letech čelí velmi zajímavým a důležitým výzvám. Nejde pouze o přechod od klasických vozidel se spalovacím motorem k hybridním nebo plně elektrickým vozidlům. Mnohem více se děje v oblasti pokročilých asistenčních systémů pro řidiče (Advanced Driver Assistance Systems - ADAS), které mají za úkol udělat silnice a okolní oblasti bezpečnějším místem pro všechny.
Výzvy při návrhu filtru Power-over-Coax pro aplikaci v automobilových kamerách
Luděk Šubrt, vývojové centrum Valeo Praha
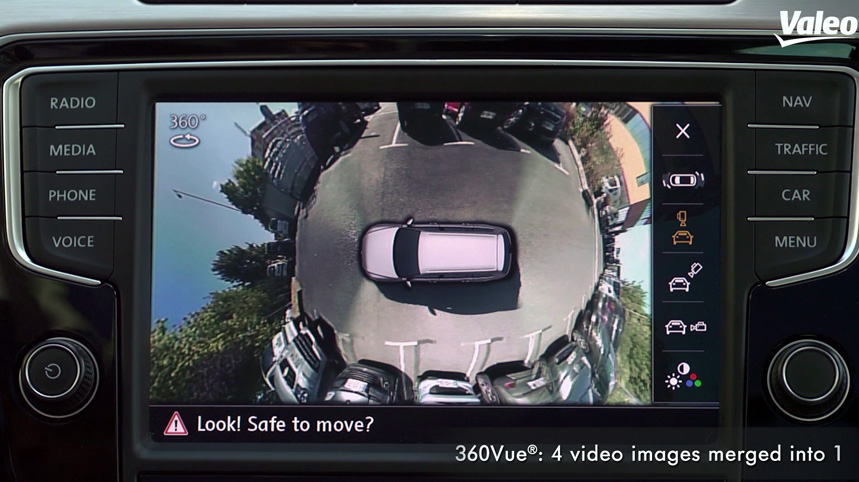
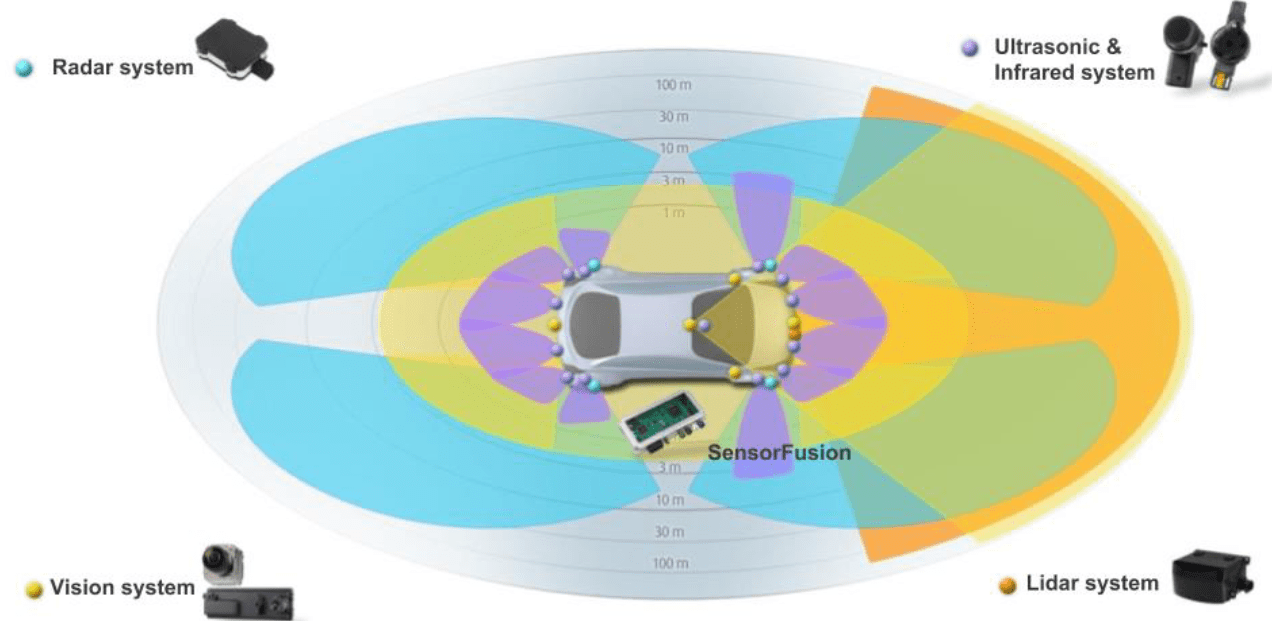
Nenahraditelnou součástí každého systému ADAS je senzor, nebo častěji skupina senzorů, poskytující data elektronické řídicí jednotce (ECU), která data zpracovává v reálném čase. Role senzorů v systému je zásadní, protože poskytovaná data mají obrovský dopad na výkonnost systému. I když existuje mnoho různých typů senzorů používaných v automobilovém průmyslu (obrázek 1), jako jsou radarové senzory, ultrazvukové senzory a lidary, tento článek se zaměřuje na kameru – klíčový senzor používaný v systémech Vision Active Safety Systems (bezpečnostní systémy s aktivní viditelností).
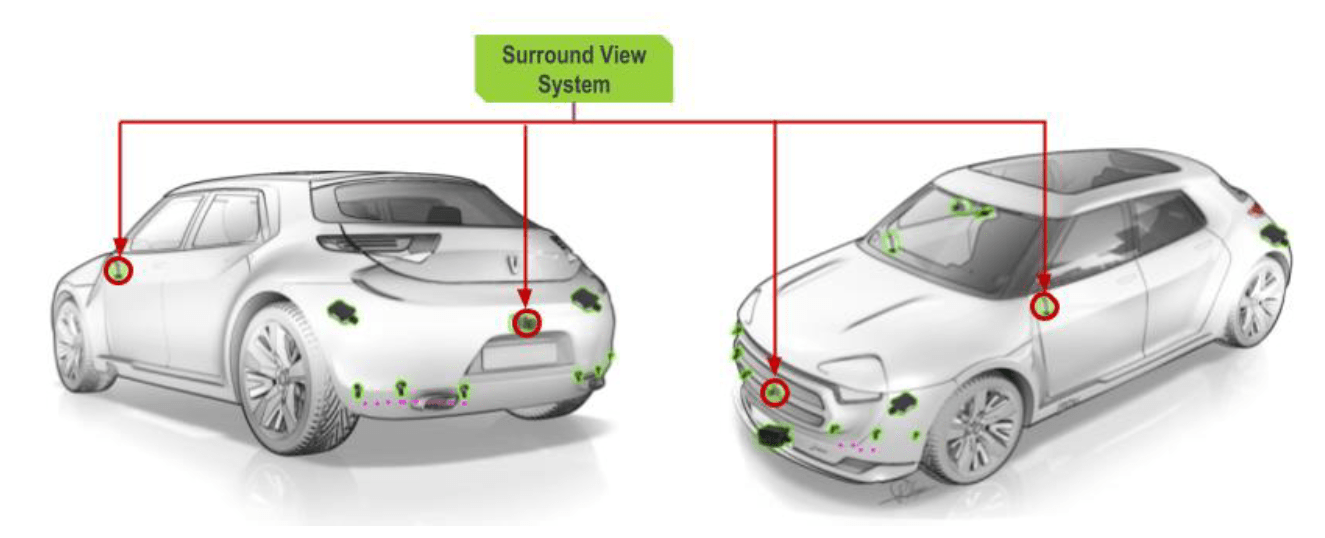
Vzhledem k povaze cílového scénáře a typu systému vidění (zadní kamera, Surround View System (systém okolního vidění), Driver Monitoring System (monitorovací systémy řidiče)) jsou automobilové kamery často instalovány na vzdálených místech, jako jsou víka kufru, nárazníky nebo zpětná zrcátka (obrázek 2). Díky tomu může být spojení mezi senzory a řídicí jednotkou v případě osobních automobilů dlouhé minimálně několik metrů a klidně i více než 10 m v případě velkých pick-upů nebo kamionů. Obvykle existují tři různé typy signálů, které je třeba přenést mezi kamerou a řídicí jednotkou (ECU) – sériová videodata, obousměrná komunikace a stejnosměrné napájení. V závislosti na typu systému a požadované funkčnosti jsou pro připojení senzorů potřeba dva nebo tři páry vodičů. To při návrhu systému přináší zvýšení hmotnosti a nákladů. Proto je pro takové připojení vhodné omezit počet použitých vodičů.
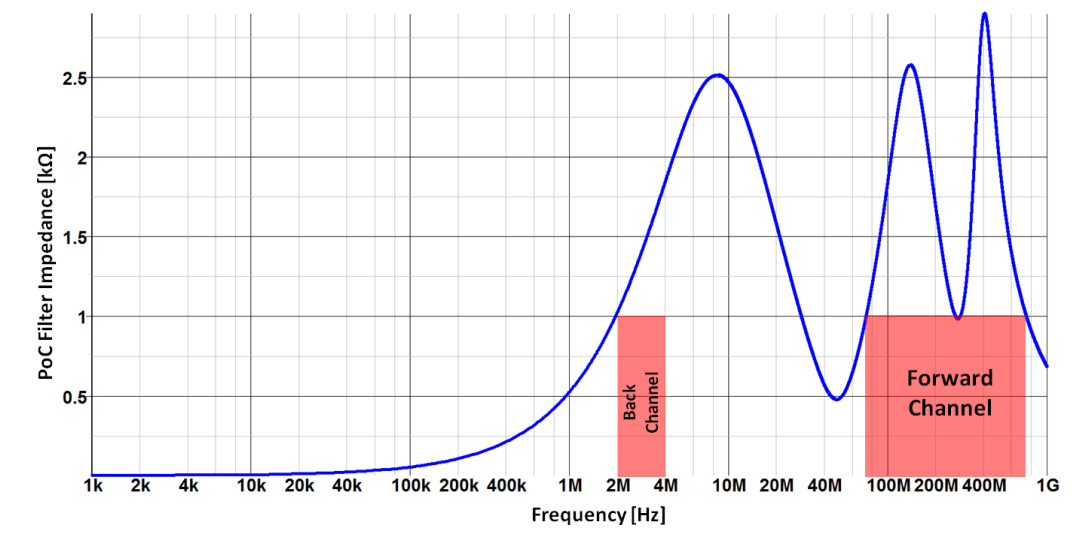
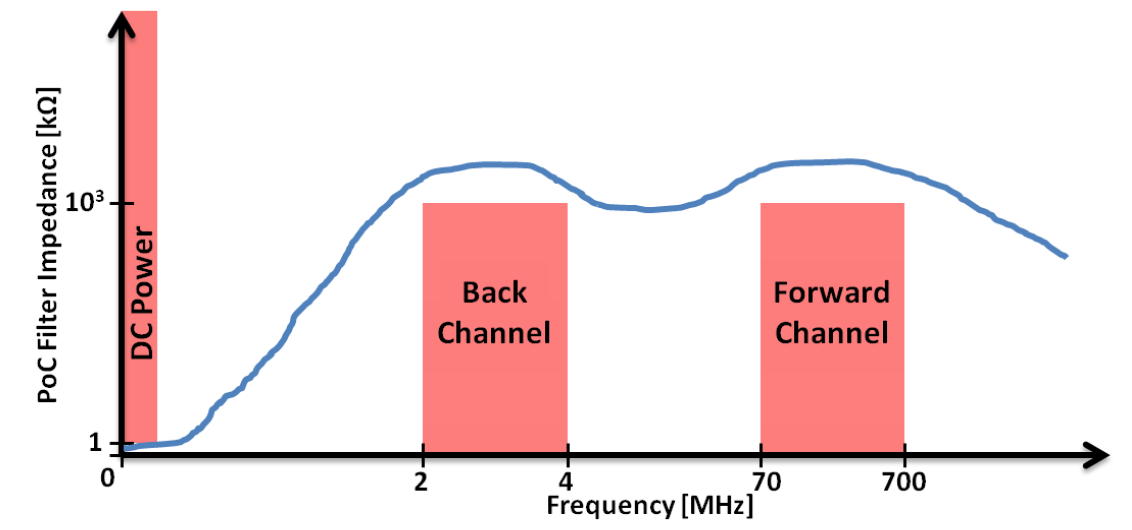
Technologie Power-over-Coax (PoC) [1], kde data, komunikace a stejnosměrné napájení sdílejí jeden koaxiální kabelový svazek, se zdá být ideálním řešením výše uvedených problémů. Přináší to výhody ve smyslu snížení hmotnosti a nákladů na kabeláž, ale na druhé straně jsou tu také některé nové výzvy, kterým musí návrhář hardwaru čelit. Protože je například fyzické médium (koaxiální kabel) sdíleno třemi signály se zcela odlišnými charakteristikami – přes 500 Mbps pro dopředný videodatový kanál, asi 3 MHz pro reverzní/zpětný komunikační kanál a nakonec stejnosměrné napájení, musí být na obou stranách komunikační linky použit vysoce výkonný filtr tvořený pasivními komponenty. Obrázek 3 ukazuje příklad charakteristik filtru, který bude použit k demonstraci výzev souvisejících s návrhem. Znázorněná impedance filtru (modrá křivka) umožňuje, aby stejnosměrný proud prošel filtrem s malými ztrátami a zároveň zastavil frekvence zpětného a dopředného kanálu definované v červených oblastech.
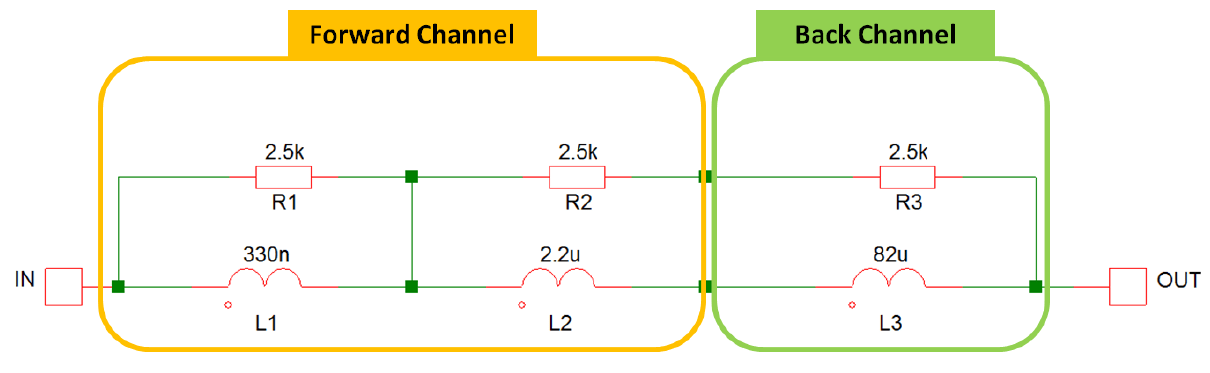
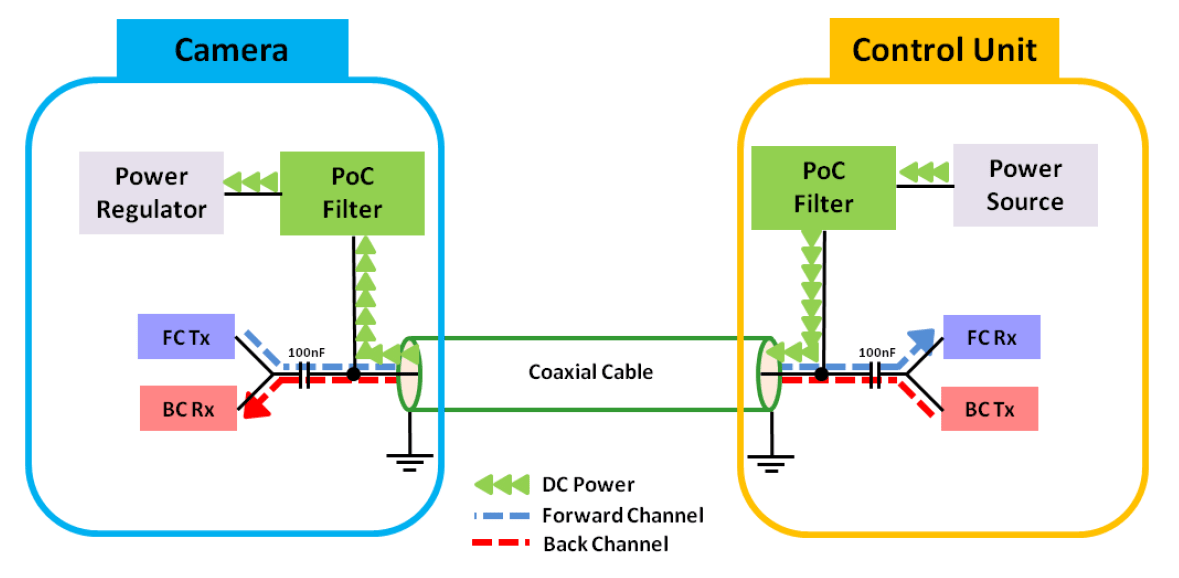
Normálně je kamera napájena ze strany řídicí jednotky (ECU), proto jsou ECU i kamera vybaveny PoC filtrem. Filtr na straně řídicí jednotky (ECU) se používá ke sloučení stejnosměrného napájení s videem a komunikačními daty, zatímco úkolem filtru na straně kamery je oddělit stejnosměrné napájení od obrazových a komunikačních dat a zajistit stabilní stejnosměrné napájení obvodů kamery. Typická topologie PoC je znázorněna na obrázku 4.
Návrh filtru není triviálním úkolem, protože je třeba vzít v úvahu mnoho aspektů. Například elektrické vlastnosti reálných pasivních komponentů tvořících filtr, vliv filtru na výkon a integritu signálu vysokorychlostní sériové linky, poklesy napětí způsobené stejnosměrným odporem komponentů a také další aspekty konstrukce specifické pro automobily, jako je zeslabení testovacích impulzů dle ISO a soulad s normami EMC.
Konstrukce filtru Power-over-Coax
Jak bylo uvedeno výše, ideální frekvenční odezvou filtru by byla impedance 0 Ω u stejnosměrného proudu a vysoká impedance v pásmech s komunikací. Ve skutečných konstrukcích je normálně přijatelná impedance nižší než 1 Ω pro stejnosměrný proud a vyšší než 1 kΩ v komunikačních pásmech (viz obrázek 3).
Pokud by existovala ideální tlumivka, stačil by ke splnění výše uvedených kritérií pouhý jeden komponent. Hodnotu tlumivky lze určit na základě následujícího vztahu: